
Jackal UGV, Autonomous Exploration of a Building
Project description
Our project group's main objective was take previous semesters progress within the scopes of ROS1 and port to ROS2's industry standard environment. This meant either new software packages were designed, or bridged directly due to updated configurations and firmware formatting. On top of this, research and implement testing features while ensuring seem-less development transferability for future iterations.
Context
Within the context of Ministry of Defense in The Netherlands, our missions focus promised new and improved operational capacity and safety to operate tasks in dangerous and life threatening situations. Our upgrade isn't just a technical evolution, but an opportunity to streamline and optimize legacy architecture and features with enhanced performance and precision. Using collective group experience, our groups (self) drive towards Safety and Security Campus's (SSC) goal helps to maximizing resources and minimizing human exposure through this innovative application of robotics and autonomous systems.
Results
The project main outcome was the successful port to ROS2, offering real time support and scalability/flexibility towards other large-scale industrial leading applications within Embedded Systems. Not only that but we provided future proofing as ROS2 is focused on ensuring ongoing availability within a modular architecture to develop, maintain and upgrade individual components without affects entire systems.
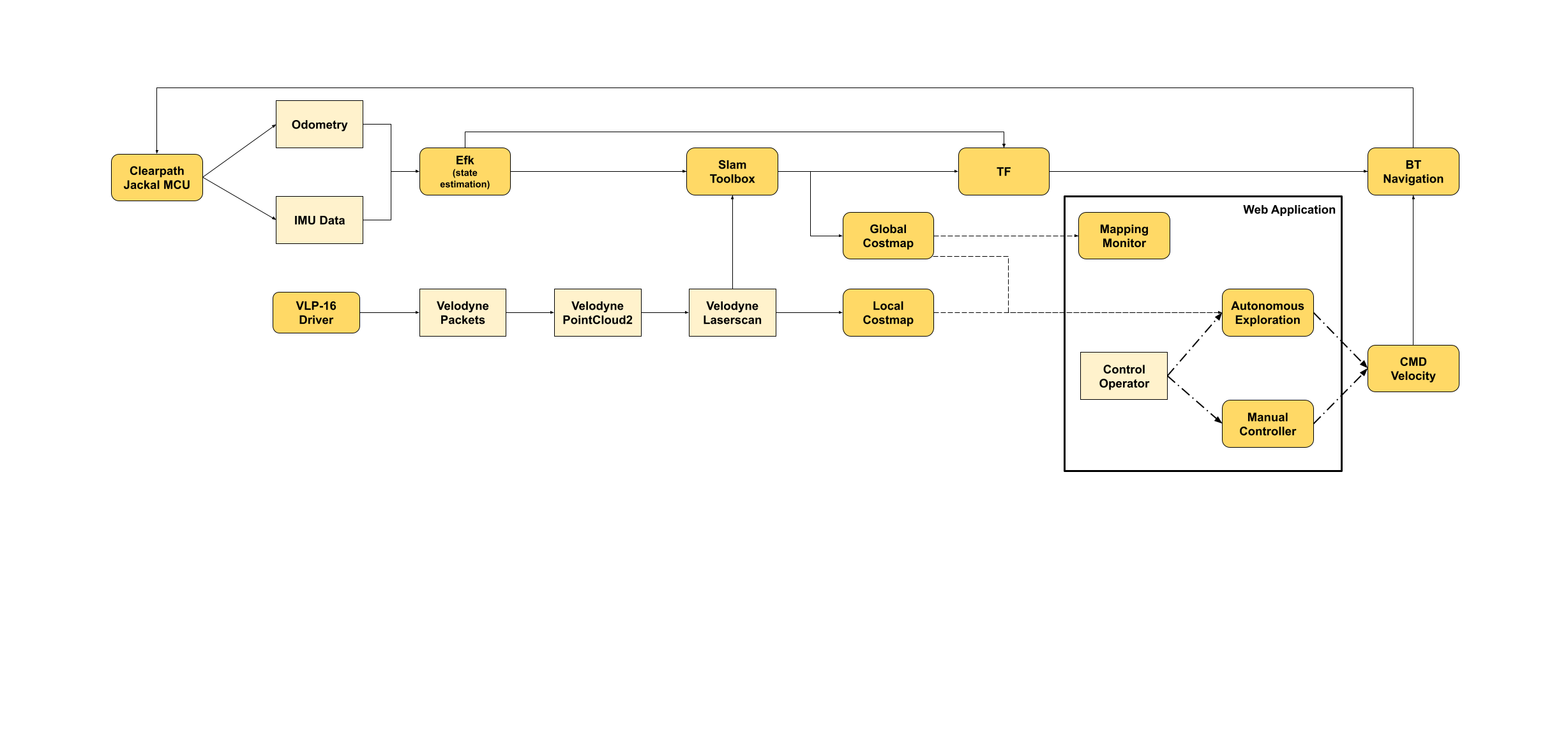
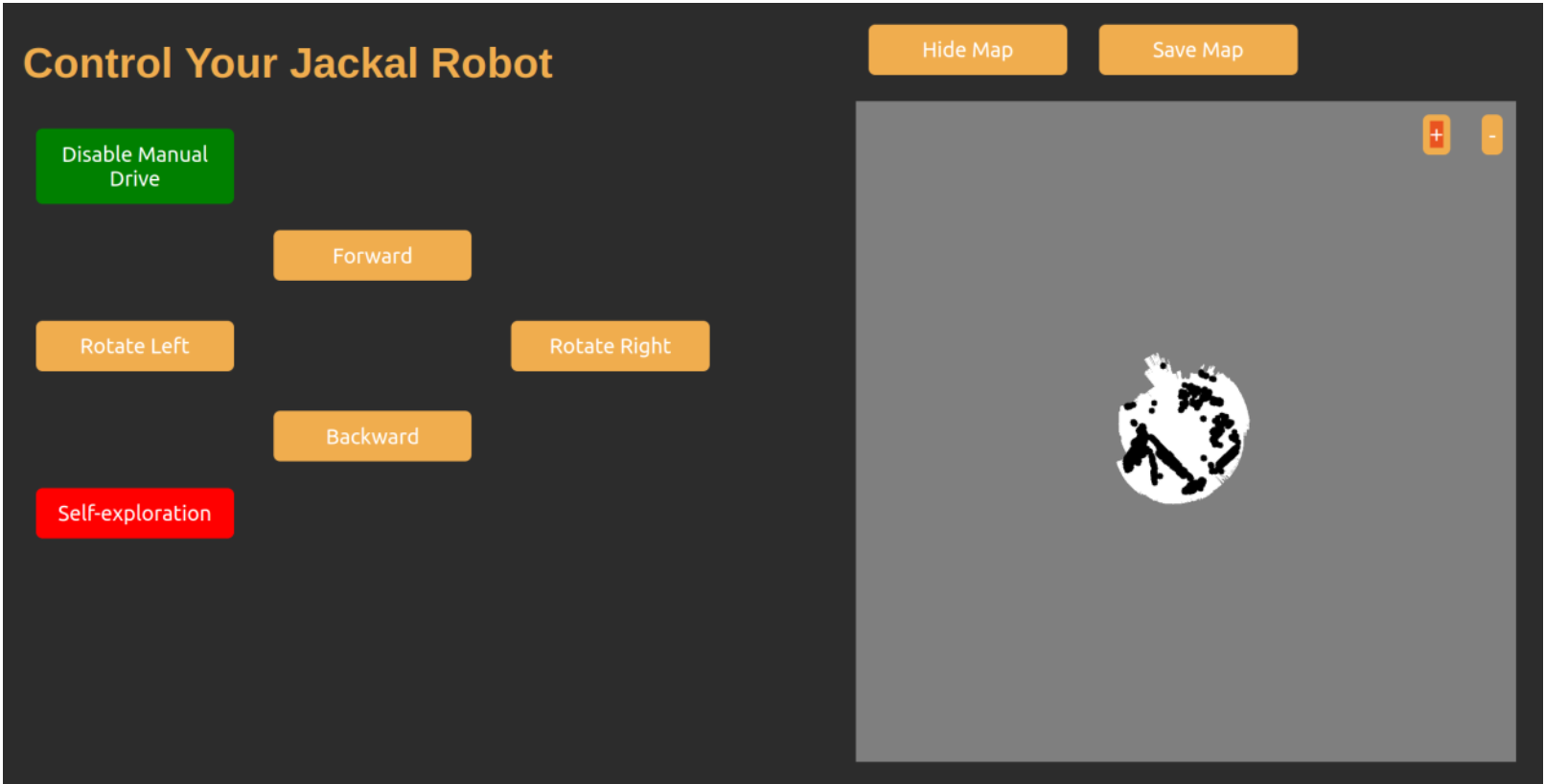
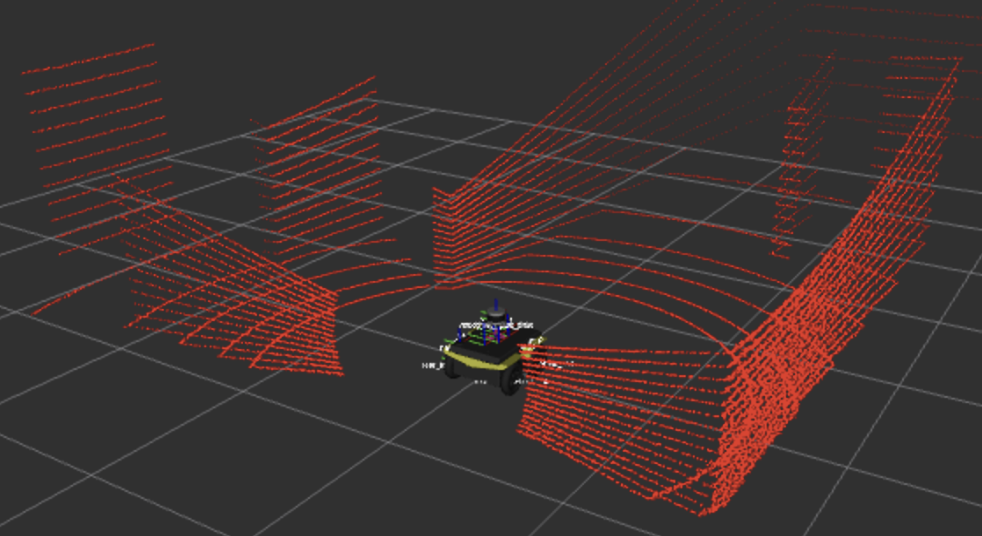
Along side this our group was able to troubleshoot, reimplement and test the autonomous navigation performance using VLP-16 perception and IMU & Odometery data combined into a state position estimation in order to gain a situational awareness of the Jackal's environment. All of which was validated through an updated Operator Web Application API, giving a choice for manual control drive or self exploration with continuous updated mapping.
About the project group
Our team of developers consisted of 3 students, all with backgrounds in ICT and Technology from Fonty's University of Applied Sciences. Along side this growing educational experience, many contained outside knowledge pertaining to electrical, autonomous and communication system through personal involvement in organizations like University Racing of Eindhoven and ProDrive Technologies. For the last 5 months the project required a dedication of roughly 40 hours a week and an Agile methodology was adopted, dividing development goals across a 3-4 week sprint timeline. This provided a dynamic work schedule and environment met with client meetings, continuous reviews and vital inner communication to assess and reflect the progress gained in an iterative format.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}