Designing a Self-Driving Distributed Lab Using Science-Use-Case-Design-Patterns and IoT Message Protocols
Master of Applied IT
Client company:RobotLab lectorate
Project description
An architectural design and message protocol is proposed for self-driving distributed laboratories, aiming to automate the collaborative execution of experiments across multiple locations. These experiments leverage high-throughput techniques, robotics, and artificial intelligence (AI). The AIs role is in steering parameters during the experiment and proposing new experiments based on previous results, thereby driving the decision-making process. A specific message protocol, chosen based on the features of the proposed architecture, handles the communication between the central hub and the distributed laboratories and robots, considering features such as topology, messaging patterns, security, and transport.
Context
Self-driving laboratories (SDLs) are revolutionizing research by using automation and artificial intelligence to expedite discoveries in fields like materials science. They enable the rapid exploration of chemical space, facilitating the discovery of new molecules and materials. The process involves executing an experiment, interpreting the results, updating the Machine Learning model, and intelligently adapting parameters for subsequent experiments. Robotics, equipped with sensors and grippers, are employed for experiment execution. A prime example is the Mobile Robot Chemist, which uses a free-roaming robot. Implementing SDLs, especially in a distributed environment, necessitates efficient and reliable information exchange between various laboratory components, achieved through a message broker. The RobotLab project, a collaboration between Dutch universities, serves as the use case. It’s a fully automated lab that designs, synthesizes, and analyzes complex molecular systems using high-throughput techniques, AI, and robotics. The RobotLab comprises a main hub connected to other labs, housing centrally stored experimental data for training AI algorithms. Distributed locations host robots and chemical instruments for experiment execution.
Results
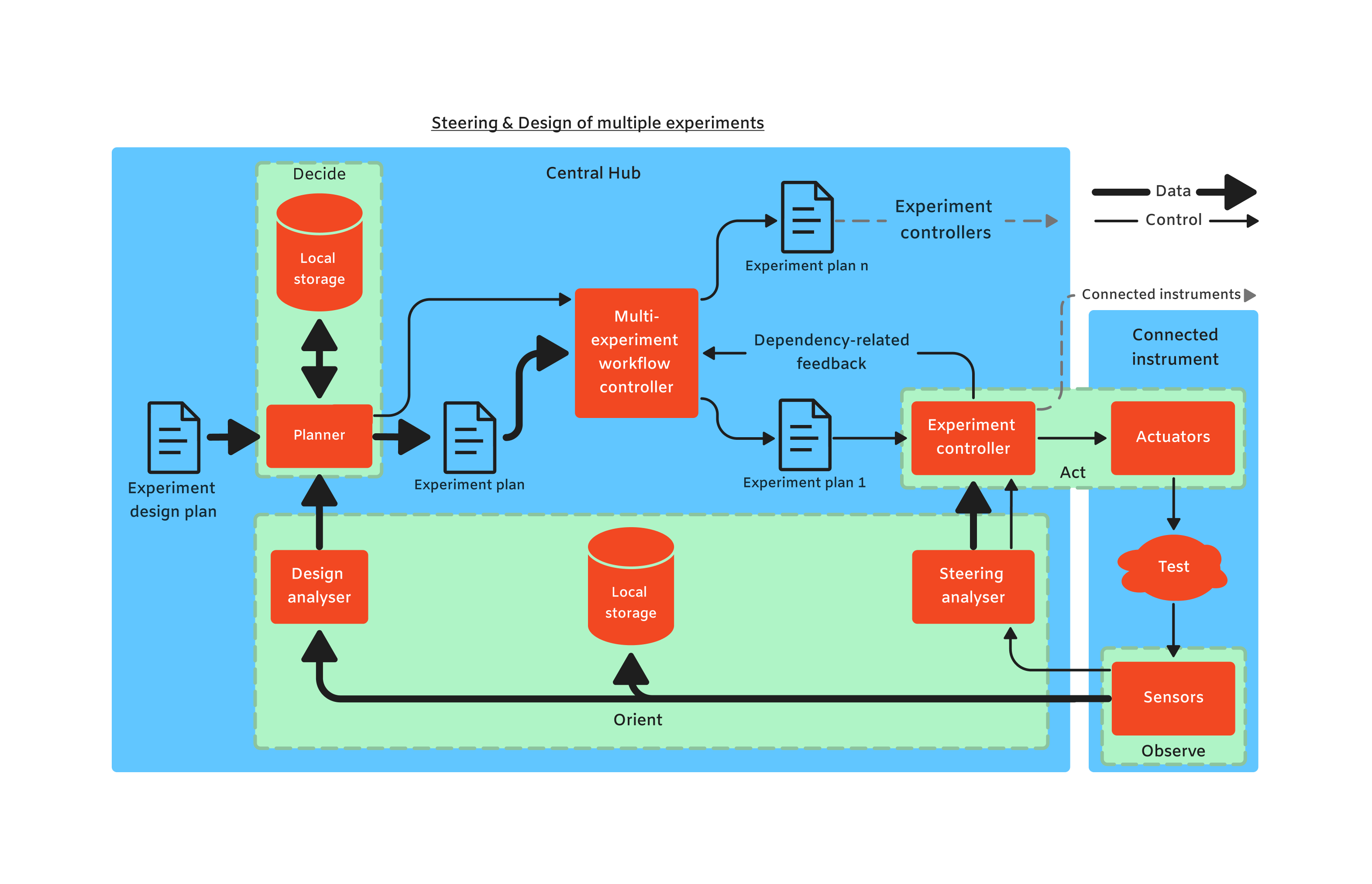
We’ve developed an architectural design and message protocol for a self-driving distributed laboratory, exemplified by the RobotLab project. The architecture, based on the OODA loop, is designed using specific design patterns and a step-by-step guide. It comprises a central hub housing analytical and controlling components, and distributed autonomous robots that receive commands from the hub and relay back experiment data. We’ve compared various IoT communication protocols for interaction between the hub and robots, considering features that align with our architecture. The MQTT message protocol emerged as the optimal choice, satisfying all key communication features.

{kind=link}